機械手臂 3D Robotics Render 著色應用
Industrial 工業用機械手臂 Robot 3ds Max Models, 3D Render 客製化生產線動作、工業自動化、產品設備加工應用表達方案。使用 3D Render 渲染的自動化解決方案為產品設備客製化應用而,可以將產品設備的方式呈現在 3D Robot 機械手臂動作、動畫影片製作中呈現自動化生產的過程,在設計和生產之前進行產品設備動作模擬效果。
KUKA KR 160 R1570 Nano
RTIS - Robot Transmission Integrated Solution 機器人搬運整合方案,提升整體效率、減少勞動力需求,運送物品作業、提供快速精確的運動,提升生產效率及安全性、產性能自動化的可靠性。使用 3D 表示生產自動化機械手臂應用方案。

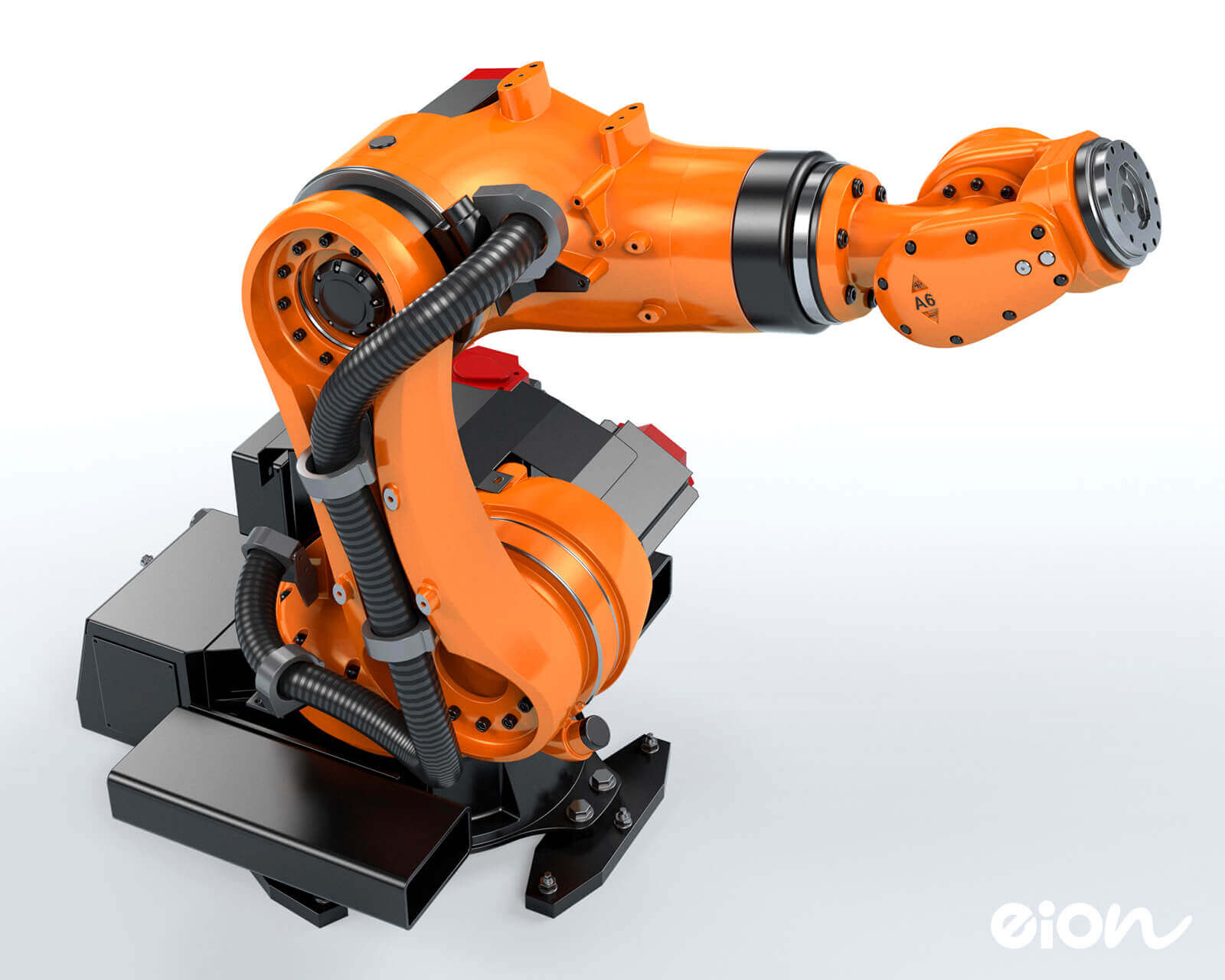

KUKA KR 160 機械手臂可以提供支持重型工件,適用於重型工件例如汽車零部件的移動搬運或組裝作業程序。
Heavy Workpieces Robotic are also supported. Suitable for transfer or assembly process of automotive parts.
重荷載機械手臂 Heavy Duty Robotic Arm
重荷載機械手臂能夠承載大型工件、高重量級物品的搬運、裝卸、工業機械手臂應用具有高度穩定性,實現工件移動過程高精度的組裝和校正,達成提高生產精度、生產之效率。
重荷載定位搬運重物 Heavy Load Handling 搭配軌道 Track Travel 行程作業,工件搬運系統可以採用雷射 Laser Sensor 感測器,偵測工作環境周邊環境坐標位置。依據需求環境及搬運工件提供夾持方式,以需求進行模型訂製達到自動化精度表達方案。

KUKA KR 1000 L750 Titan
KR 1000 L750 TITAN 具有 Larger Load Capacity 擁有更大的搬運負荷能力、並且可以快速跨越 7.5M 長的大範圍工作距離,仍然維持準確的傳送工件位置。提供完整機械加工自動上下料解決方案、應用於重荷載物料搬運、大型工件包裝、重複往返定位、工件堆疊、CNC 加工機、車床、銑床、自動化快速穩定的供料方案。


輕量型機械手臂應用
輕量型機械手臂應用,輕量型工業用機械手臂主要用於小型物品搬送、組裝和檢查等應用中有著廣泛的應用前景。通常具有輕巧的結構和高速動作的能力,可以實現快速的運動操作。Mitsubishi MELFA RV-2F RV-4F RV-13F 依需求選擇可搬運重量適合在有限的作業區域內進行精確的操作、小型物品生產線的零件位置轉移,進行螺絲緊固等組裝操作。
Lightweight Robotic Arm 輕量型機械手臂在 Items Moved 物品搬送、Assembly Inspection 組裝和檢查等應用中具有提高生產效率、節省人力成本、提高產品質量。

垂直型機械手臂、台灣三菱電機 Mitsubishi 工業用機械手臂 MELFA RV-2F 配備簡單易用的操作界面,便於編程和操作。可以用於小型物品的外觀檢查、尺寸檢測等工作,並對異常進行檢測,具高速和高精度性能並結合智慧型技術,可輕易連接微處理器電子設備 PLC 可程式控制器 Programmable Logic Controller 設備、自動化、小型 Workpiece 工件產品設備應用,可以實現快速的運動和操作。

EPSON N Series 輕量型機械手臂
愛普生機器手臂、EPSON N Series 輕量型機械手臂採用六軸精巧摺疊式手臂設計為有限空間內依然能帶來傑出性能、小型化與智慧化,應用於產業自動化呈現高速度、高精度與低震動之特色、基於高精度微型元件總成經驗的結晶及傑出客戶支援,集中工業自動化顯示及管理、遠端即時監控、提供高性能及操作簡易性以及快速的掌握關鍵技巧,整合全方位自動化解決方案。
EPSON N2 FOLDING ARM
Epson N2 快速、輕巧、輕量的 6-Axis Compact Robot 機械手臂,自動化工業 High Precision 高精度與 High Flexibility 高靈活度的特性、折臂式六軸機械手臂,採用可折疊式手臂設計,優勢在減少安裝空間,實現智慧製造系統效益,可以搭配機器視覺、手臂定位 CCD 機器視覺系統、判別對位 OCR Smart Camera 檢測、機器視覺影像檢測,機械手臂視覺系統整合、AOI Automated Optical Inspection 高速光學影像、自動光學檢查、檢測各類型物料瑕疵檢查。
自動化焊接設備應用
Automatic Welding Robotic Equipment
ARC WELDING MIG/TIG 電弧熔接
KUKA Robotic KR16 ARC for Automatic Equipment 機械手臂、工業應用於自動焊接過程之中運作的高度靈活性和精確性使得它能夠自動執行多種焊接設備 Welding Equipment 包括平面焊接、立體焊接和曲線焊接和優化焊接路徑、焊接速度、焊接電流、焊接電壓和其他焊接參數,以確保最佳的焊接效果和焊接品質。

電弧熔接 Arc Welding 使用空氣電極放電物理 Electric Arc Welding 電弧焊作為熱源的熔焊方法 ARC Welding 離子弧焊是利用電弧是在大電流以及低電壓條件下,通過電離氣體時放電所產生的熱量,熔合金屬與工件使其在冷凝後形成焊縫,泛用型常用於自動化焊接設備。
專為工業物聯網 IIoT 設計的解決方案、應用於工業物聯網、第四次工業革命(稱為工業 4.0)將數位資訊與實體作業技術結合,即時分析的能力創造出靈敏且相互連結的品質以及即時運作效率。
YASKAWA MH180 High-Speed Robotic Arm
自動化焊接機械手臂,採用多個關節和末端焊接組件組成,使機械手臂能夠靈活地在 X, Y, Z 空間中移動和操作以確保焊接點的位置和方向的準確性。工業自動化中特別是在大量生產中,可以快速而準確地執行焊接任務提高生產效率,並且能夠在重複動作中精確定位,確保焊接品質的一致性。控制系統可以通過對焊接機械手臂的運動進行精確控制,實現高品質的焊接。
機械手臂傳動系統負責將控制系統發出的信號轉換為機械位置運動,以便操縱機械手臂進行焊接操作。感應偵測器可以對焊接過程中的各種參數進行監測和控制,以確保焊接品質。Automatic Welding Robotic 焊接機械手臂的算法優化可以通過算法優化來實現更好的角度及計算最佳路徑、除了效率且保持焊接的精確度。


安川自動化焊接機器人 YASKAWA MH180 六軸垂直多關節機械手臂,高速多用途機械手臂。可應用於自動焊接、汽車焊接、工件夾取、自動噴塗、物件追蹤 Inspection 檢查,原材料處理,和包裝搬運應用。
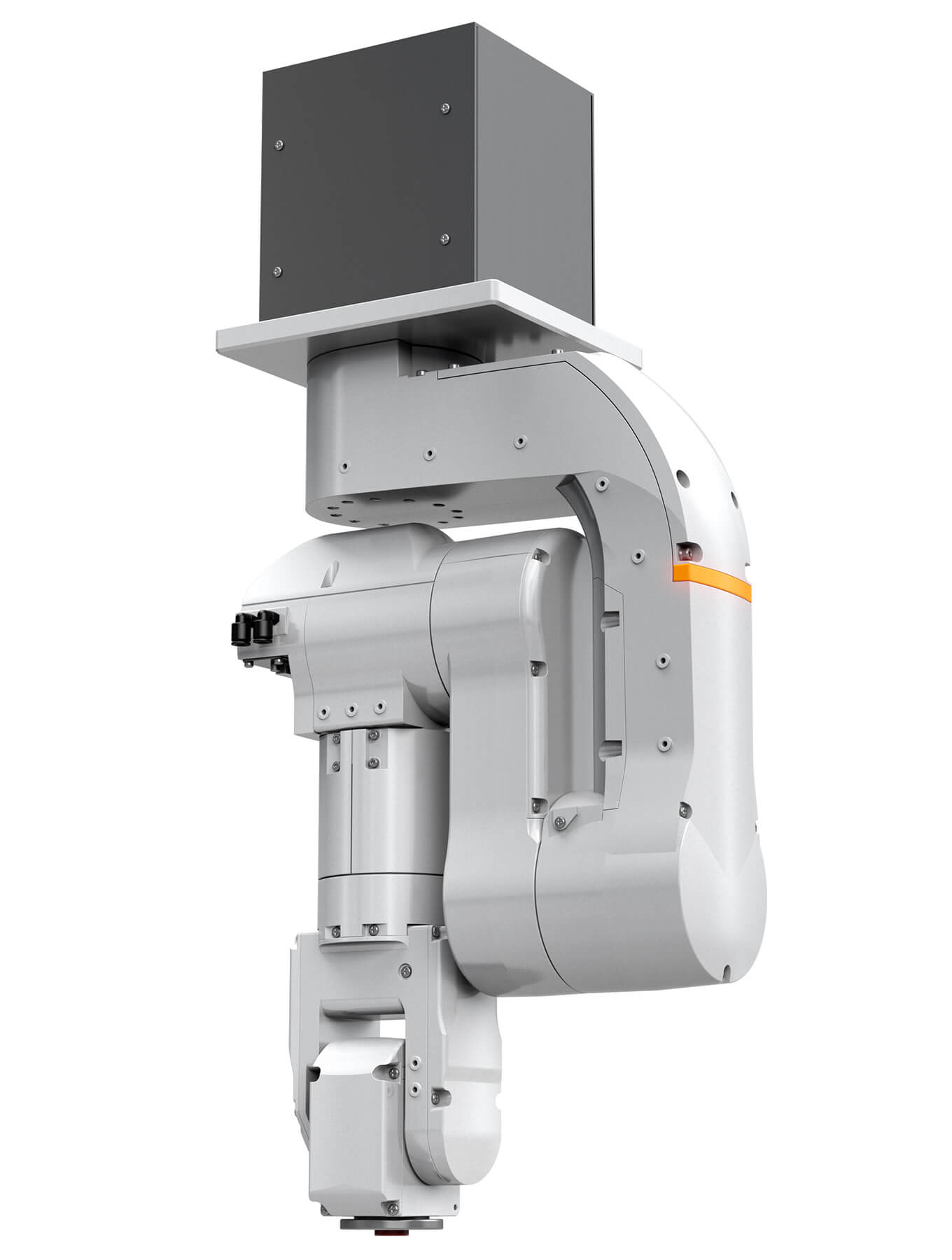
Robot 皮帶驅動傳動結構
Belt Drive Robot
垂直多關節機器人 Belt Drive Robot 手臂關結使用 Belt Transmission 皮帶傳動、傳動機構皮帶輪與皮帶本身的彈性所構成,皮帶驅動與皮帶輪面間摩擦力的作用拉力,替代齒型 Gear Drive 齒輪驅動方式。

Robot Belt Drive Transmission Structure, Robot Arm Pulley and Belt Transmission.
產業自動化 Belt Drive Robot 機械手臂採用皮帶驅動傳動方式,使用皮帶輪 Pulleys 和皮帶組成的傳動系統來傳遞動力和運動。動力傳動方式由多個皮帶輪組成,每個關結或說軸向都有一組 Pulleys, Belts 皮帶輪、皮帶,皮帶輪與電機馬達相連。電機驅動皮帶輪旋轉,皮帶便會沿著輪周轉動,從而使機器人運動。其優點重量輕、且皮帶在傳動過程中的彈性可以吸收衝擊和震動,皮帶傳動噪音較小。缺點由於皮帶和帶輪的摩擦力較小,動力傳動效率較低,皮帶驅動系統的最大速度、最大扭矩也受到皮帶的長度和寬度的限制。採用 Gear Drive 齒輪驅動是直接傳遞動力和運動的傳動方式,由於齒輪之間的齧合可以直接傳遞動力和運動,傳動效率比皮帶驅動更高可以提供更穩定的傳動,對機器人的運動更加準確。負載能力強、可以承受更大的負載和扭矩,但齒輪傳動的結構比較複雜,所以需要更多的維護和保養。
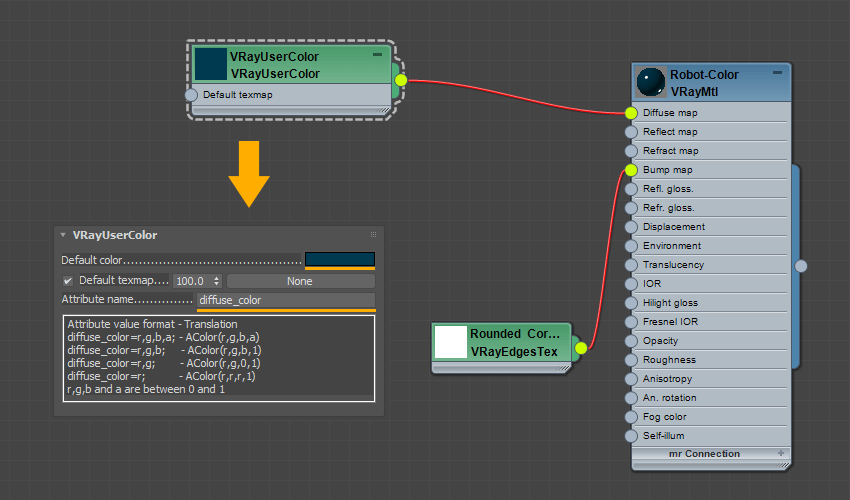
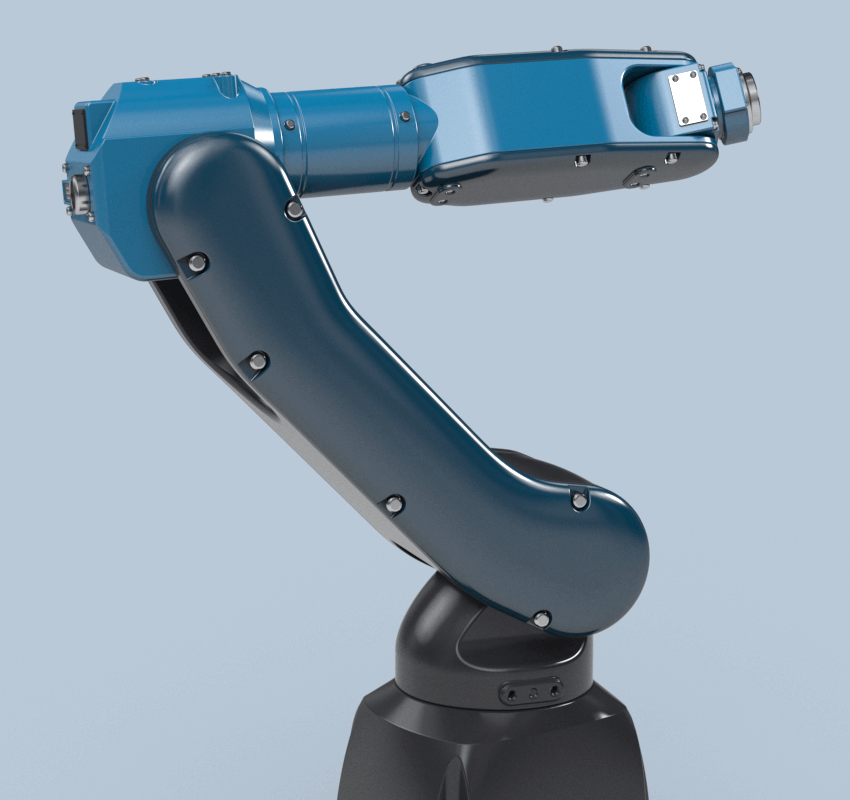
VRayUserColor 用戶定義的顏色
V-Ray Material
可用於從當前模型上節點讀取 User-Defined 用戶定義的 Object Properties 對象屬性,並將其轉換為顏色值。
Default color 默認顏色:如果在當前模型對像上找不到指定的 User Defined 用戶屬性則使用默認的顏色。
Default texmap 默認紋理貼圖:指定在當前模型對像上找不到 User Defined 用戶屬性時要使用的默認紋理。
Attribute name 屬性名稱:指定用戶定義屬性的名稱「字符串」。例如 diffuse_color
User Defined 用戶屬性
將模型上側面蓋板、右鍵 Object Properties 對象屬性 User Defined 用戶屬性,填入色彩的值。
diffuse_color = 0,0.01,0.02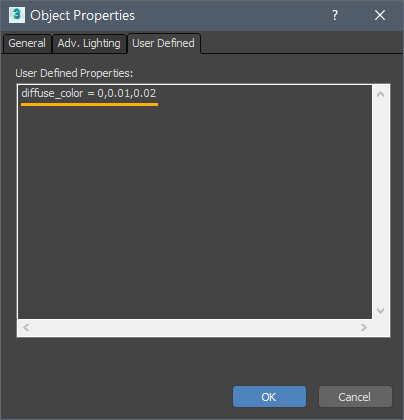
側面蓋板則會使用 diffuse_color 色彩的值、其他未設置的依然為 Default color 默認顏色。
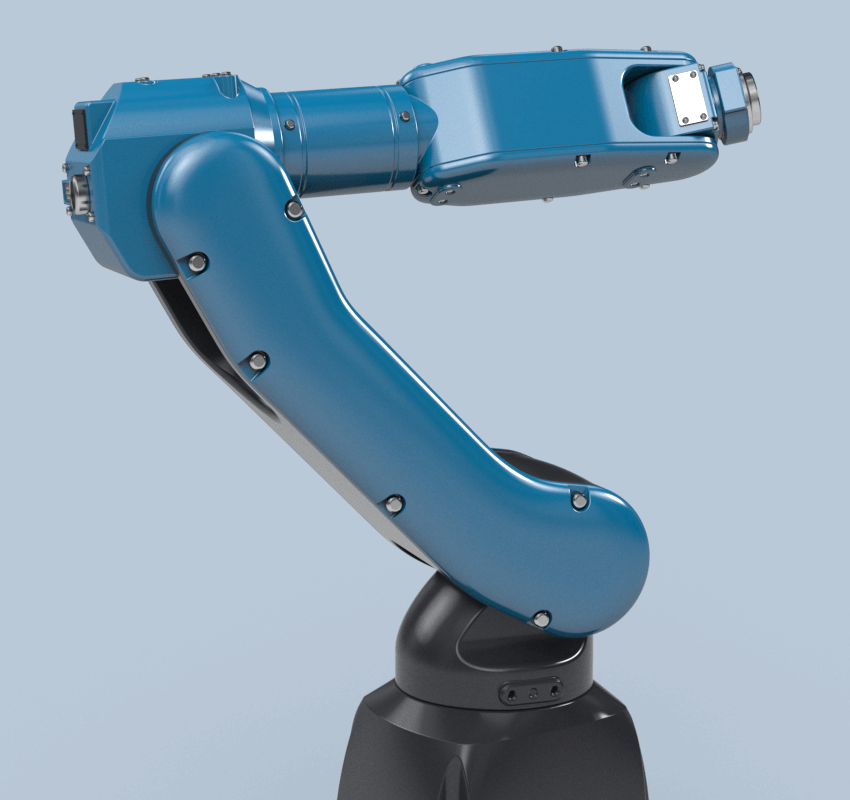
VRayUserScalar 標量
可用於從當前模型上節點讀取 User-Defined 用戶定義的 Object Properties 對象屬性,讀取並返回一個數字值,從而得到結果。
將相同的材質應用於場景中的多個對象,通過 User-Defined 用戶定義的屬性來控制其 Glossiness 光澤度。
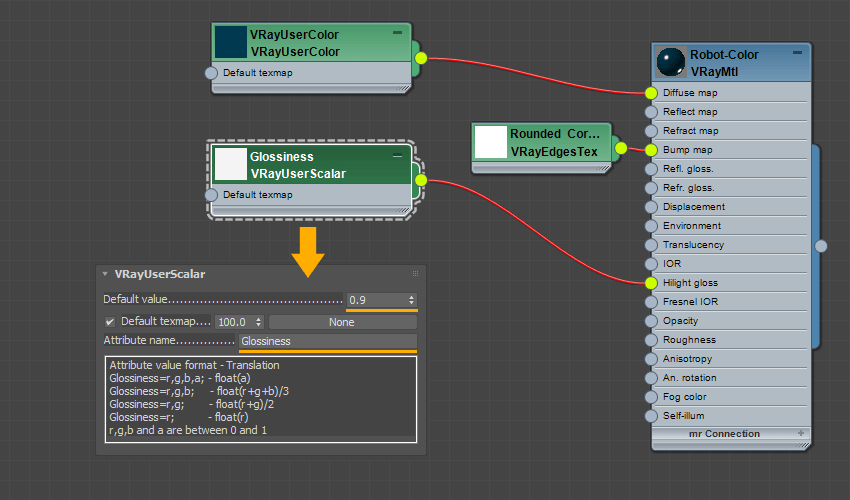
Default value 默認值:如果在當前模型對像上找不到指定的 User Defined 用戶屬性則使用默認的值。
Default texmap 默認紋理貼圖:指定在當前模型對像上找不到 User Defined 用戶屬性時要使用的默認紋理。
Attribute name 屬性名稱:指定用戶定義屬性的名稱「字符串」。例如 Glossiness
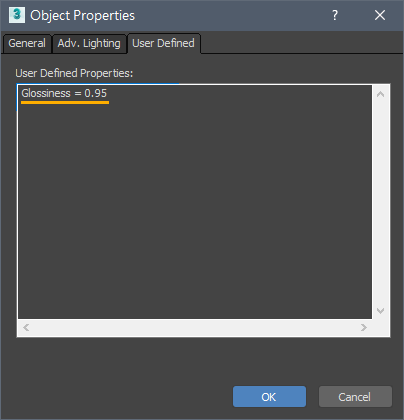
User Defined 用戶屬性
Glossiness = 0.95如果沒有 User Defined 用戶定義的值,則使用默認的值 0.9。讀取到 Glossiness = 0.95 則使用定義的值。
當相同材質應用於多個對象「金屬零件」例如 Stainless Steel 不銹鋼,但也許部份配件的 Glossiness 光澤度有不同,使用 VRayUserScalar 各別來設置就不用建立許多個材質球。在相同材質下每個零件都有自己的光澤度參數。可以準確控制其金屬光澤參數,製作出更理想的圖面效果。